- Published on
Kestrel Mini – Tandem-Wing Tailsitter VTOL UAV
- Authors
- Name
- Vinamr Arya



Introduction
Kestrel Mini is a compact, fully 3D-printed tandem-wing tailsitter VTOL UAV developed as an experimental platform to investigate whether a VTOL aircraft can achieve stable hover, controllable transitions, and efficient forward flight using only fixed-pitch rotors and geometric stability. The project integrates aerodynamic modeling, structural design, and iterative prototyping to arrive at a configuration that requires no tilt mechanisms or aerodynamic control surfaces.
Initial Modeling and Concept Development
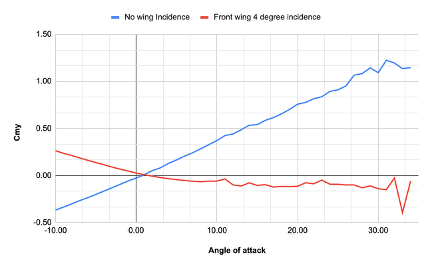
The design process began in OpenVSP, where an initial straight-tandem configuration was created to explore fundamental parameters such as wingspan, airfoil selection, and wing incidence. Early aerodynamic trade studies examined lift distribution, pitching moments, and stall behavior. These studies showed that a slightly higher incidence on the front wing produced a consistent nose-down restoring moment, offering passive pitch stability in forward flight.


With these preliminary results, the first physical prototype—featuring a simple I-beam fuselage and straight tandem wings—was fabricated to validate basic hover performance and structural behavior.
Structural Evolution and X-Frame Geometry
Flight testing of the initial prototype revealed significant torsional twist along the fuselage during differential thrust maneuvers. This structural flexibility introduced lag in control response and made the aircraft difficult to stabilize. To address this issue, the wing architecture was redesigned.
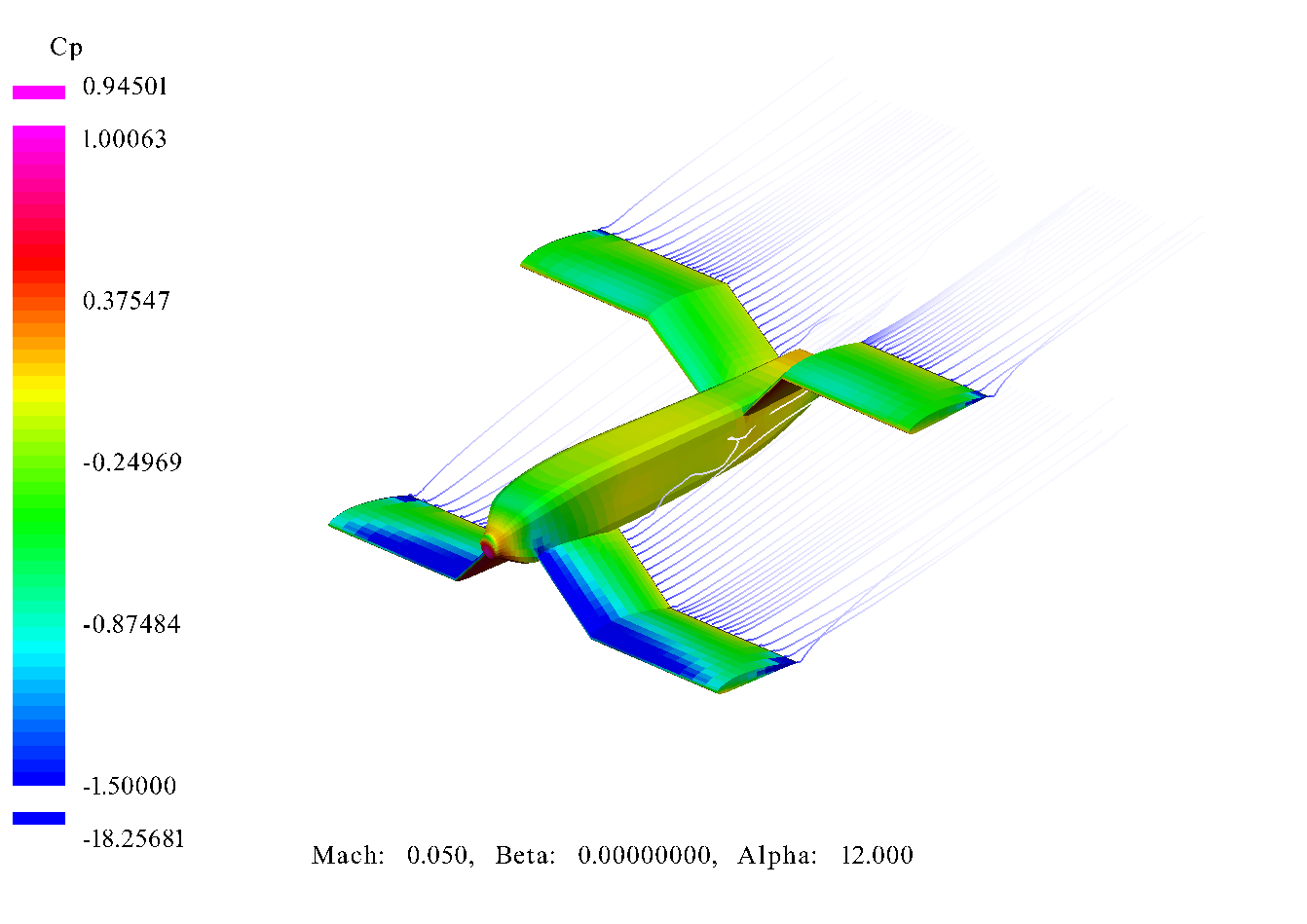
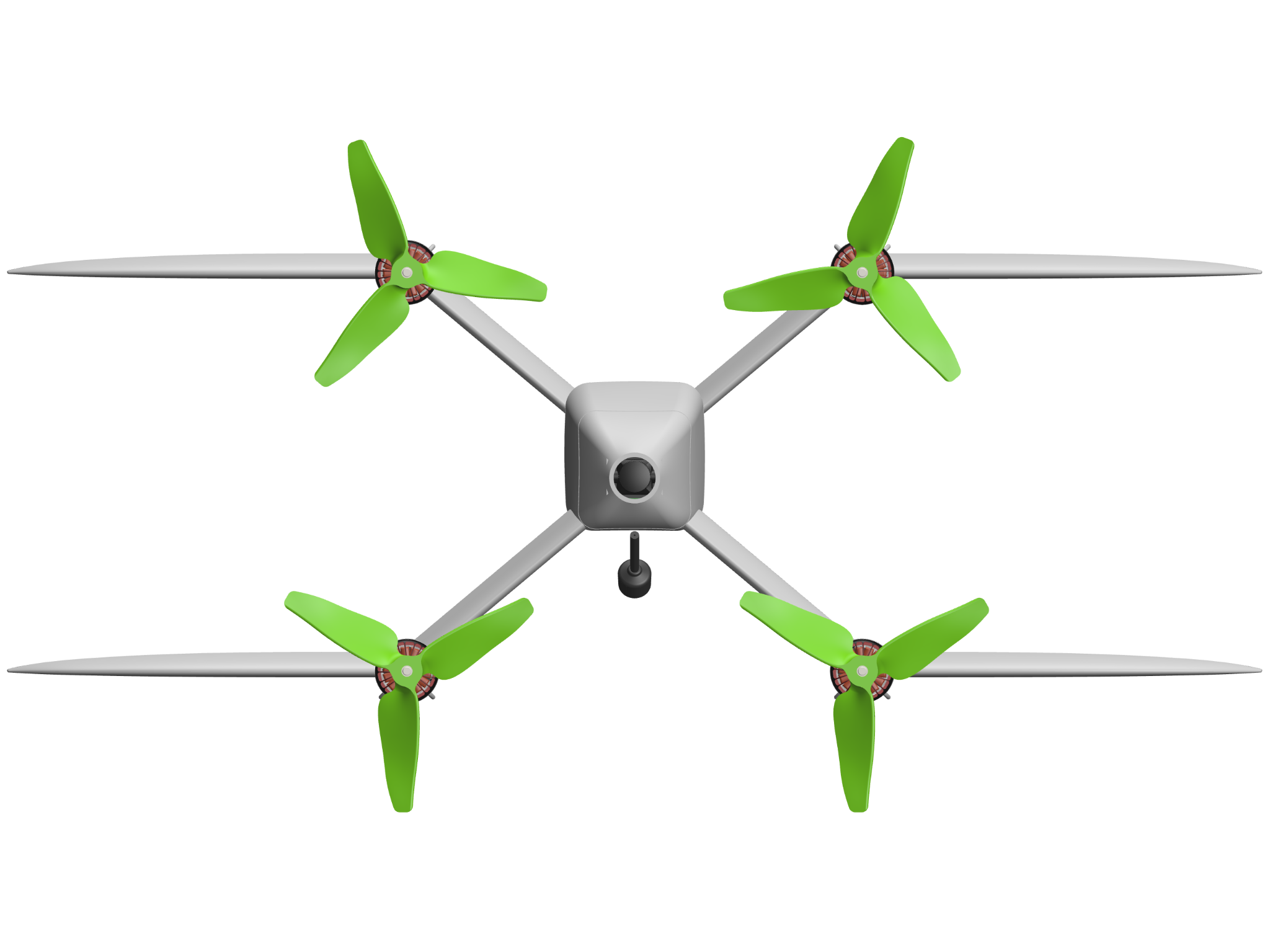
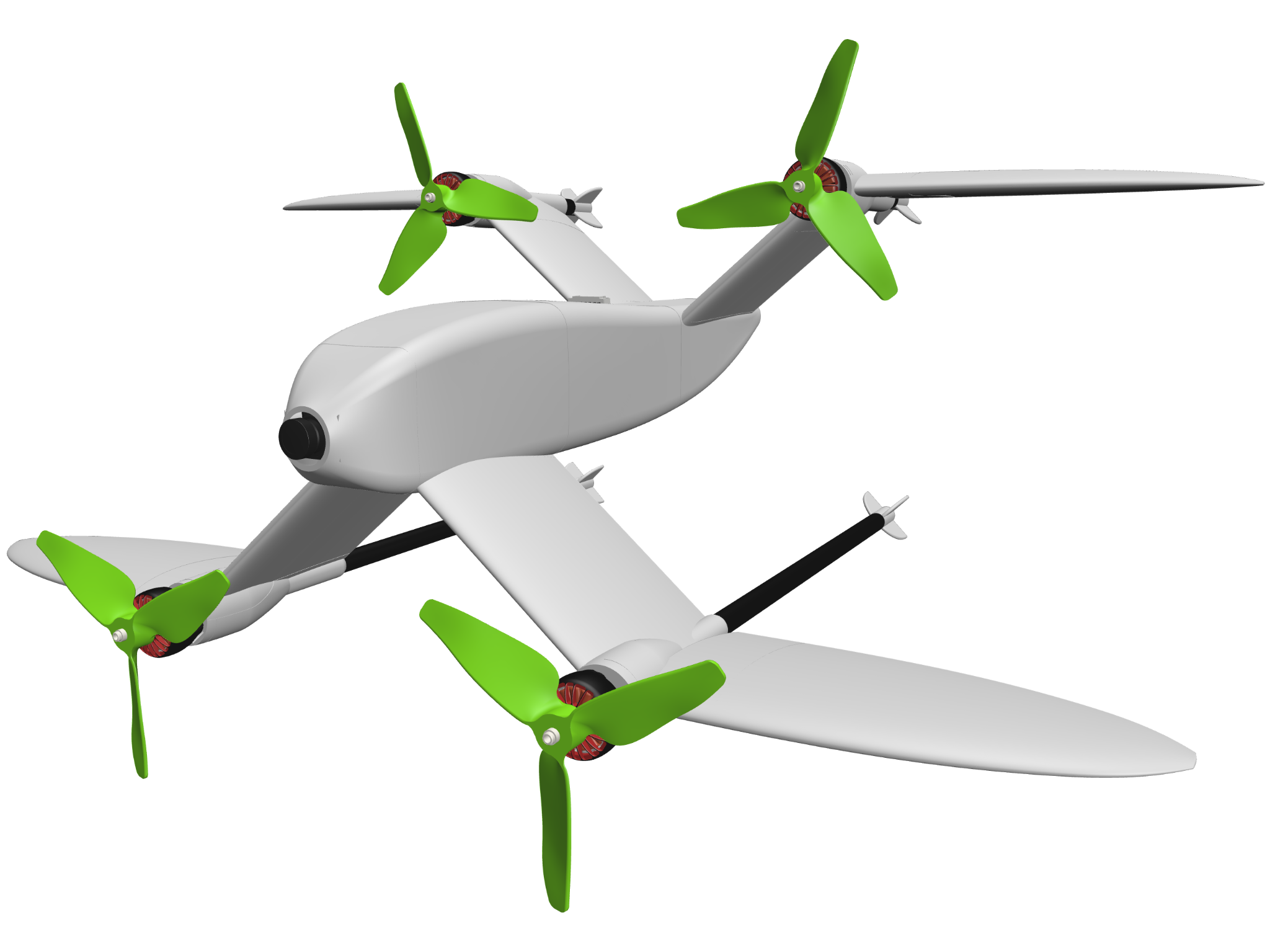
Returning to OpenVSP, the straight wings evolved into a gull-wing front surface and an inverted-gull rear surface, forming a closed X-frame when the aircraft is in the hovering orientation. This geometry provided two key advantages:
- Substantial improvement in torsional stiffness, reducing twist to well below critical levels.
- Beneficial aerodynamic effects, with the canted panels acting as a passive stabilizing surface similar to a V-tail.
This redesign marked the transition from a conceptual layout to a refined, test-ready configuration.
CAD Development and Modular Construction
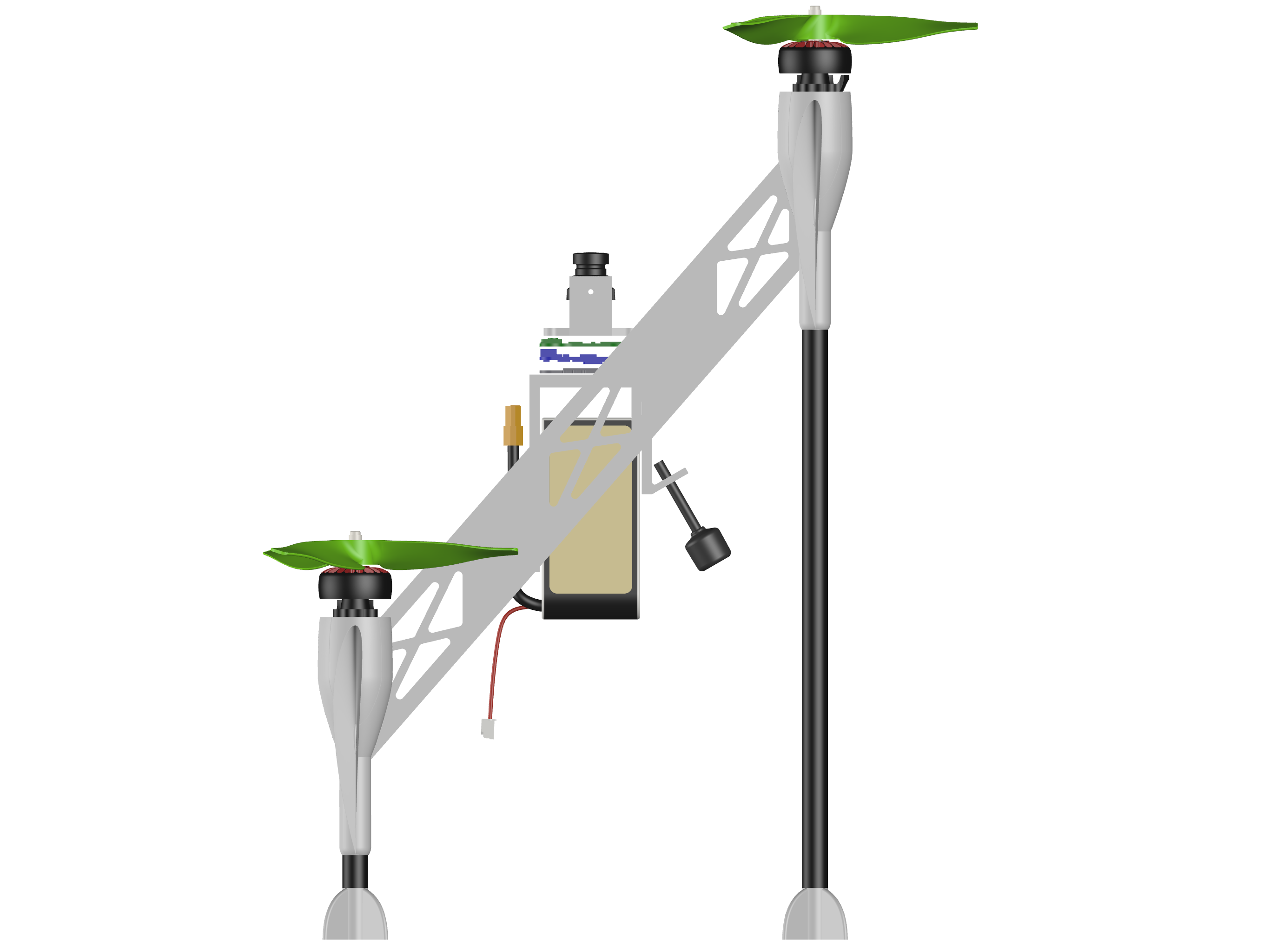
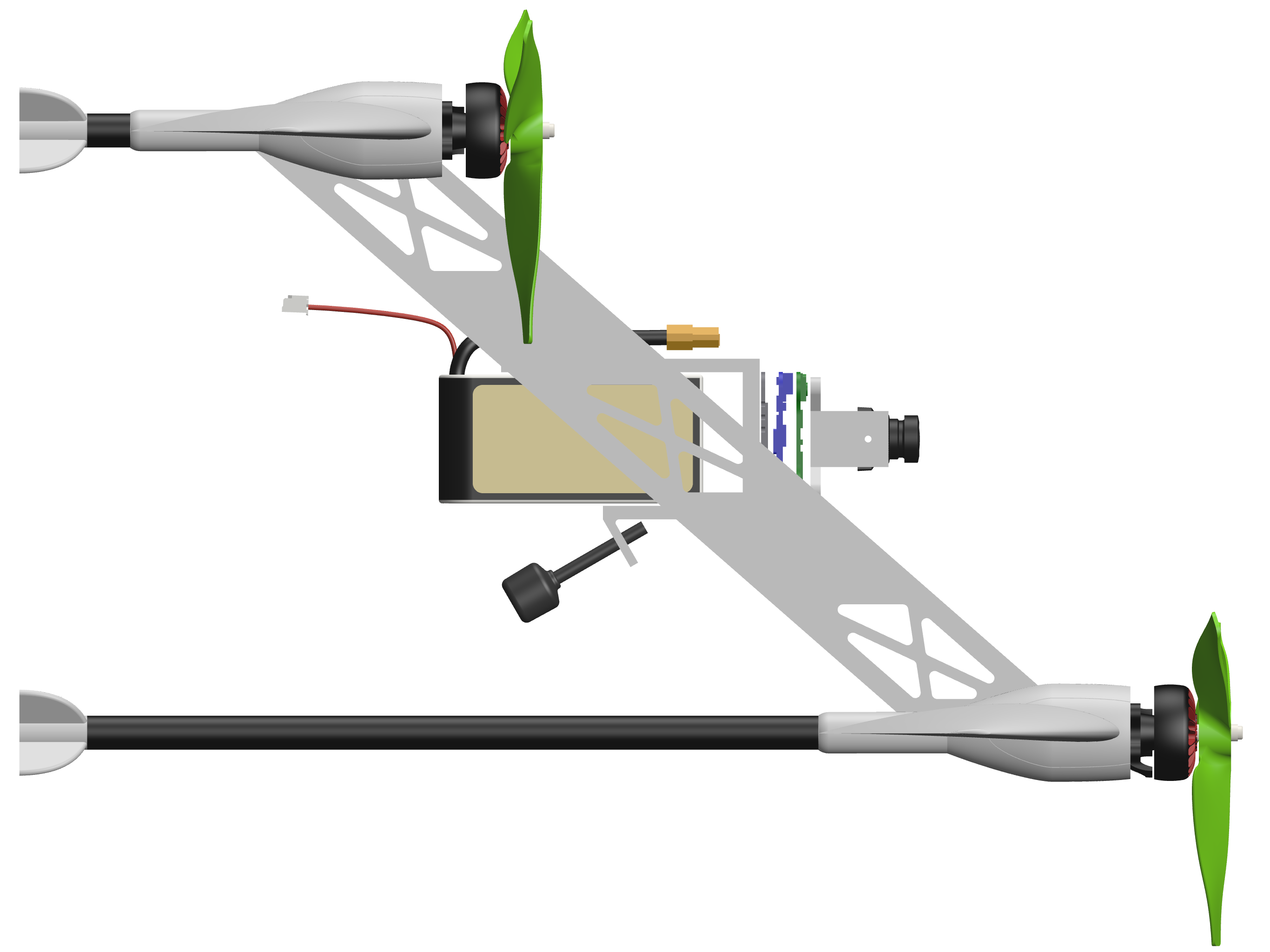
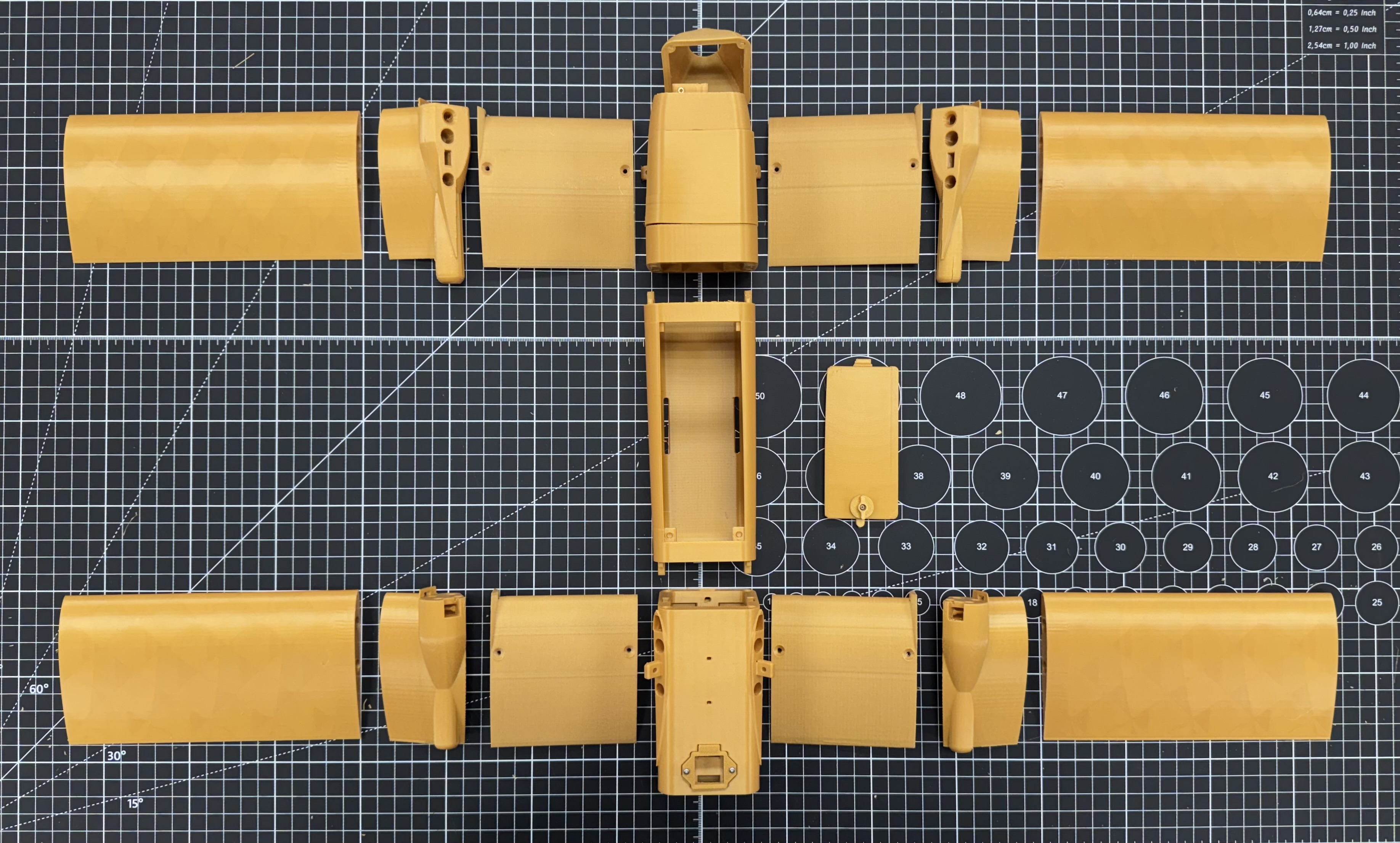
With the X-frame geometry validated in simulation, the aircraft was translated into a full CAD model designed around modularity and manufacturability. The airframe consists entirely of interlocking PETG components, reinforced with carbon-fiber spars along major load paths. Each module—wings, fuselage sections, and motor pods—can be replaced individually, allowing rapid iteration and repair.
The use of FDM 3D printing kept fabrication cost low (under $50 for a complete airframe) and enabled fast turnarounds between design modifications. This workflow made it possible to cycle efficiently between simulation, CAD updates, and physical testing.

Propulsion and Control Architecture
Kestrel Mini uses four 2207-class brushless motors with 5.1×3 propellers, providing a thrust-to-weight ratio slightly above 2:1. All attitude control is achieved through differential thrust using a Betaflight-based flight controller.
Two flight profiles were implemented:
- a hover profile tuned for high-authority corrections
- a forward-flight profile tuned for smoother, low-gain stability
A transmitter switch enables mid-air mode transitions. This approach maintains the project’s goal of mechanical simplicity while providing adequate control across the flight envelope.
Flight Testing and Performance Assessment
Extensive hover, transition, and forward-flight tests were conducted to evaluate the final configuration.
Hover performance was stable, with lift-off occurring at approximately 26% throttle and attitude deviations kept within a narrow range. The enhanced stiffness of the X-frame eliminated the control lag observed in earlier prototypes.
Transition testing was performed manually by pitching the aircraft into forward flight. Transitions took 2–4 seconds, typically with less than 1.5 m of altitude loss. The aircraft demonstrated predictable behavior throughout the maneuver, consistent with the aerodynamic characteristics identified in simulation.
In cruise, Kestrel Mini achieved speeds of approximately 20 m/s with noticeably lower power consumption than in hover. Range tests showed an effective reach of 4.5–5 km with a moderate payload, representing a significant efficiency advantage over conventional multirotor aircraft using similar propulsion systems.
Impact and Relevance
Kestrel Mini demonstrated that a tandem-gull-wing tailsitter can offer stable, predictable flight using fixed-pitch rotors and carefully shaped geometry. The project established a design framework that later informed the development of larger UAVs within the Kestrel family, including platforms aimed at medical delivery and early wildfire-response applications.
The aircraft validated several key principles: that structural and aerodynamic coupling can reduce mechanical complexity, that modular 3D-printed construction is effective for rapid UAV development, and that small tailsitters can achieve meaningful cruise efficiency.


Conclusion
Kestrel Mini followed an iterative process of simulation, structural refinement, modular fabrication, and flight validation, ultimately demonstrating that a simple four-motor tailsitter can operate effectively across hover, transition, and forward-flight regimes. By relying on aerodynamic geometry rather than mechanical complexity, the aircraft serves as a proof-of-concept for accessible, efficient VTOL design and continues to influence ongoing research and development efforts.
Thesis:
This project is based on the research documented in my graduate thesis.
View the full thesis