- Published on
MAT 4 – UAV for Autonomous Payload Delivery
- Authors
- Name
- Vinamr Arya


Introduction
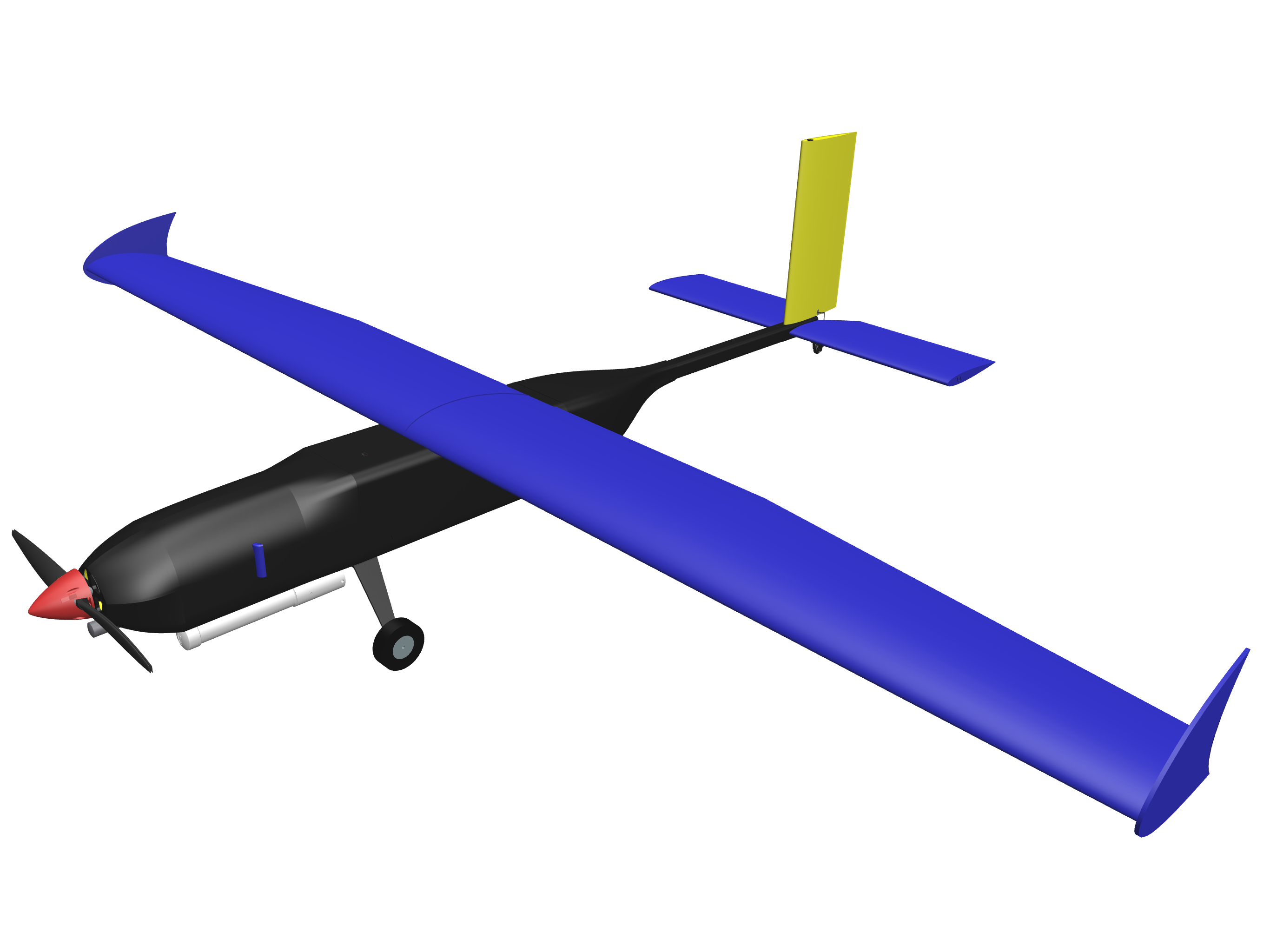
MAT-4 is the aircraft designed by University of Michigan's M-Fly Student team for the 2022-2023 AUVSI SUAS Competition. The aircraft was engineered to carry out precise payload delivery missions, navigate a multi-mile waypoint course, and comply with FAA’s 55 lb maximum takeoff weight requirement.
The project features a high-aspect-ratio wing, composite construction, an internally-housed payload-delivery mechanism, and a full autonomous stack built around Pixhawk 4, Jetson Nano, and onboard computer vision. Development followed a structured process of aerodynamic sizing, structural design, propulsion testing, and systems integration, supported by repeated flight testing and validation using real-world mission profiles.
For more about the M-Fly team, please visit mfly.engin.umich.edu.
SUAS Competition Requirements
The AUVSI SUAS rules required the aircraft to:
- Navigate a 12-mile mission through GPS waypoints
- Remain within 75–400 ft AGL
- Deliver five 16-oz payloads with high positional accuracy
- Complete the mission within a 30-minute time limit
- Perform manual takeoff/landing but operate autonomously in flight
- Stay below 55 lbs MTOW
These constraints shaped every major design decision, from aerodynamic layout to propulsion sizing, payload integration, and autonomy.
Design Approach and System Architecture
The project philosophy centered on simplicity, reliability, and iterative testing. Early in development, the team prioritized:
- A single-motor propulsion layout for efficiency
- A taildragger configuration for robustness and weight savings
- Internally integrated payload housing to maintain center of gravity
- Composite wings and fuselage for a strong weight-to-stiffness ratio
- A modular avionics stack for maintainability and rapid troubleshooting
This approach ensured that each subsystem—structures, aerodynamics, propulsion, autonomy, and hardware—was developed in parallel yet remained tightly integrated. Much of the content below is supported by detailed design data in the team’s technical documentation and CDR deck.
Aerodynamic Design
MAT-4 uses a high-aspect-ratio 11.25 ft wingspan wing built around the MH114 airfoil, selected for its high lift-to-drag ratio and suitability for long-endurance missions. Aerodynamic sizing placed the aircraft’s wing area at 12.875 ft² with a design point of:
- T/W ≈ 0.4
- W/S ≈ 3.09 lb/ft²
AVL and OpenVSP trade studies were used to size the horizontal and vertical stabilizers and to assess static and dynamic stability. Key findings included:
- 6.1% static margin, giving stable pitch behavior
- Level-1 dynamic stability in short period, roll, and Dutch roll modes
- Control surfaces sized for low deflection angles even during steep turns
The aerodynamic layout—semi-tapered wing, conventional tail, and wingtip fences—was optimized for endurance and handling consistency across loading conditions.
Structural Design
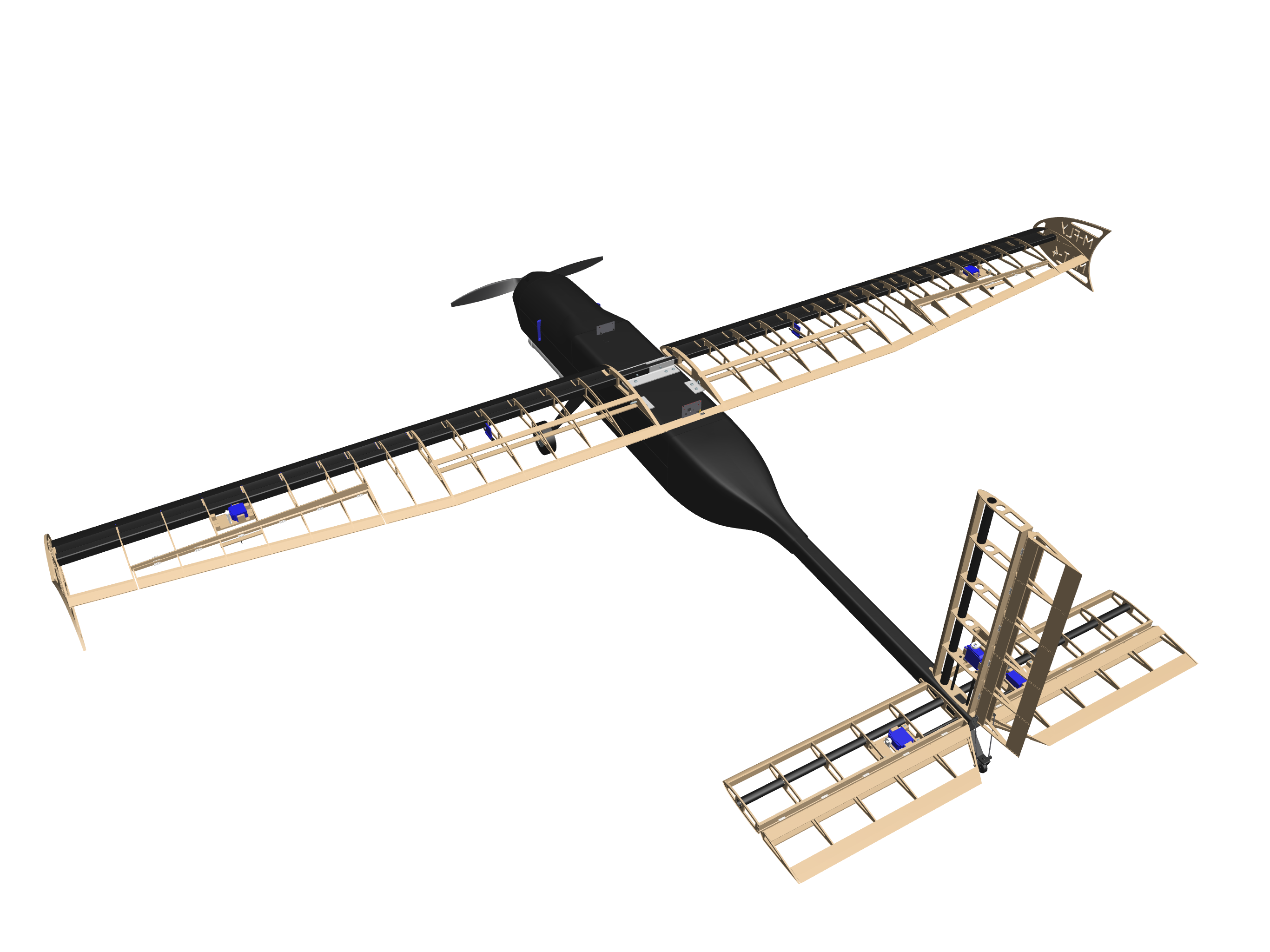
As Structures Lead, I oversaw the structural layout, composite selection, mass budgeting, and manufacturability of the aircraft. The design used:
- Composite fuselage for weight-efficient stiffness
- Carbon-fiber leading edge + spars in the wings
- Hybrid ribs (balsa, lite-ply, CFRP reinforcements)
- Additively manufactured components such as the motor duct, radar cover, and servo hatches
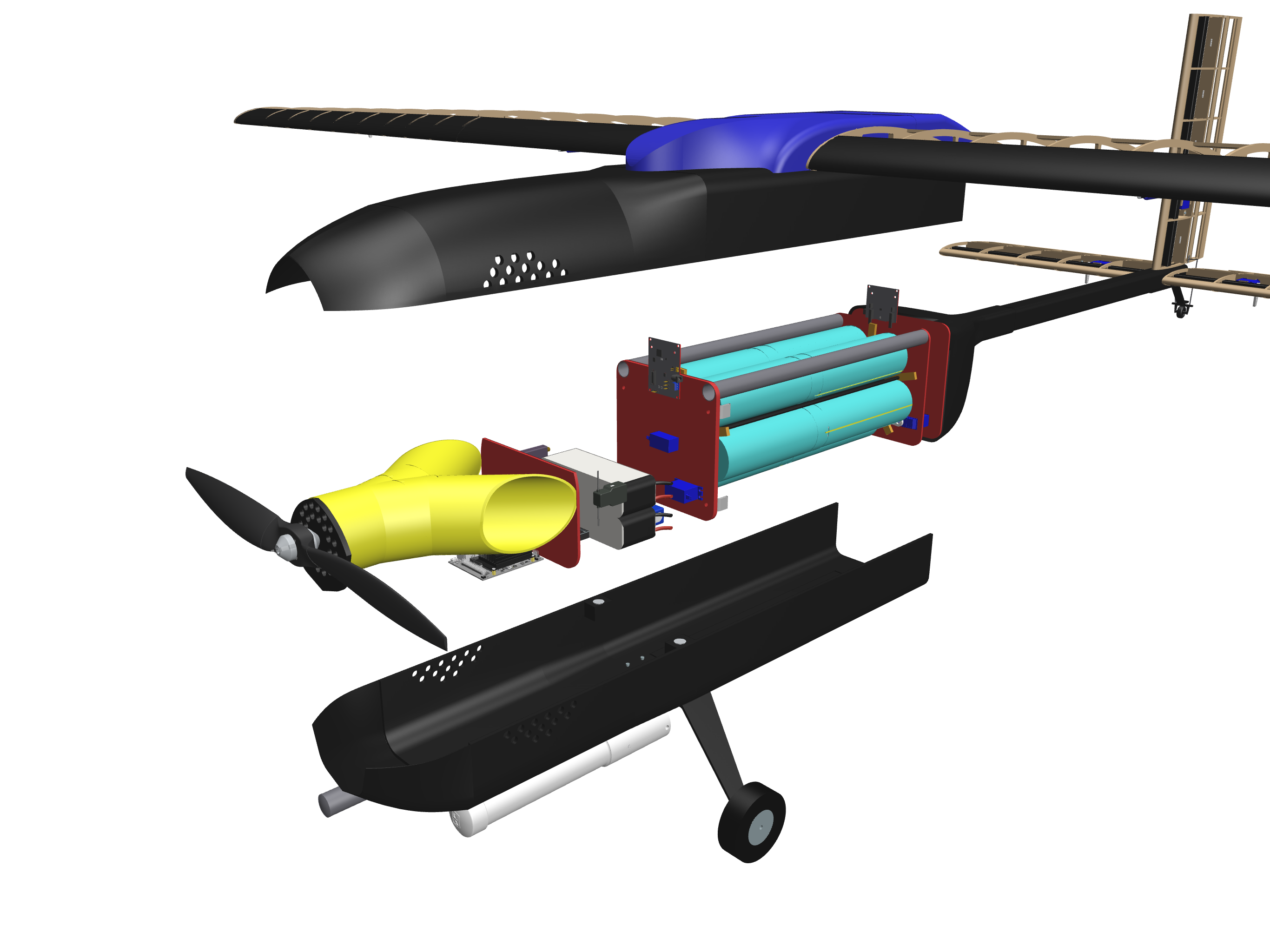
The fuselage was divided into four functional sections:
- Section A: Motor, motor duct, Jetson Nano
- Section B: Avionics + batteries under a large service hatch
- Section C: Payload bay with servo-operated hatch and drop mechanism
- Section D: Tail boom receiver and empennage mounting
This layout maximized usable internal volume while keeping wiring routing and maintenance straightforward.
Payload Delivery System
Payload delivery was one of the primary mission requirements. MAT-4 utilized a robust revolver-style drop mechanism housed inside the fuselage to minimize drag and ensure CG consistency.
Key features:
- Can carry five 16-oz water-bottle payloads
- Carbon-fiber dowel reinforcement for the rotating rack
- Servo-driven release synchronized with flight computer commands
- Payloads loaded and dispensed through the aircraft belly
- Integrated parachute housing with spring-loaded doors for clean deployment
Sensor integration included a BMP390 altimeter and microcontroller-based trigger logic for parachute release.
Propulsion System
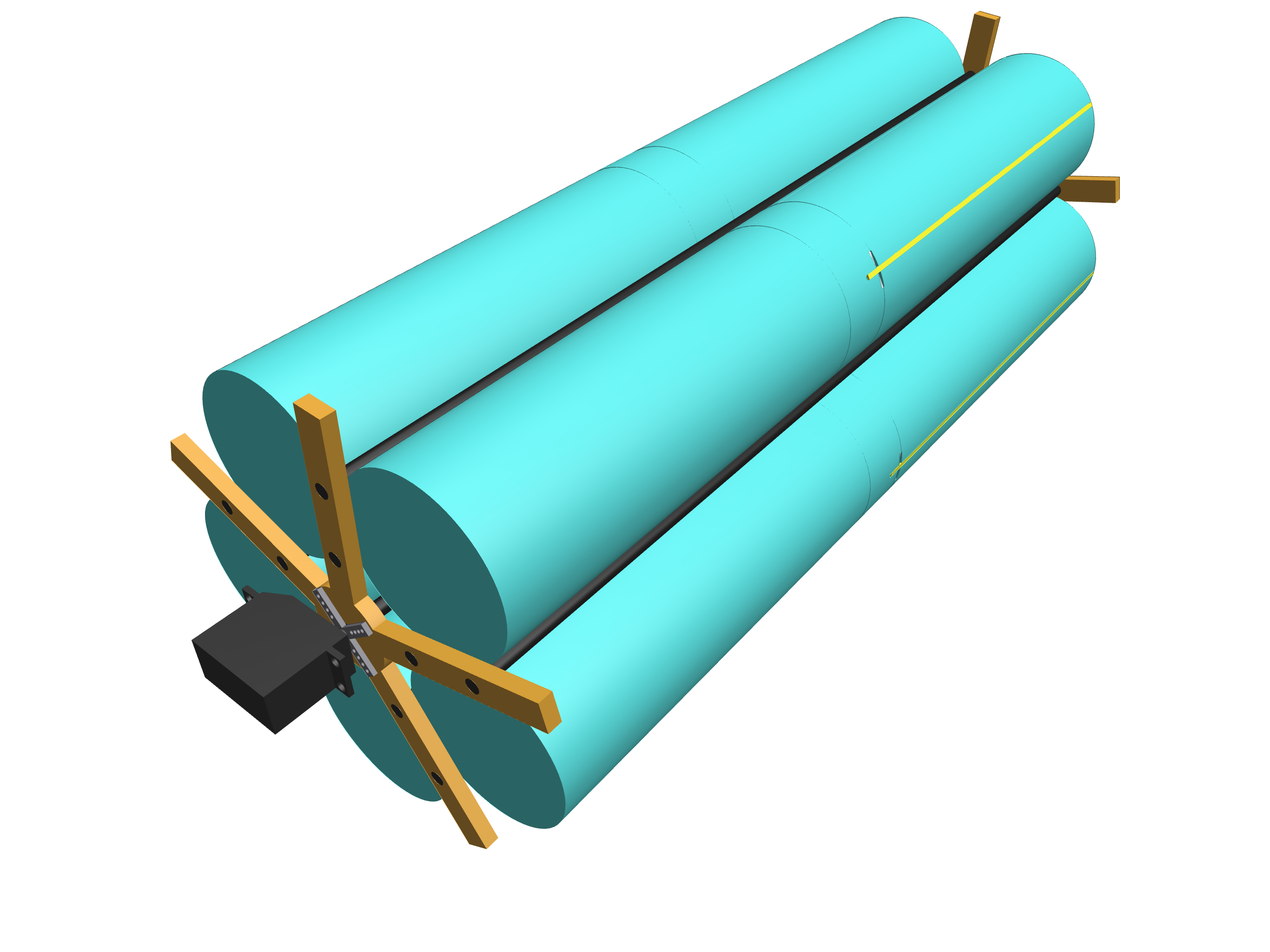
MAT-4 uses a Hacker Q80 brushless motor paired with a 24×13 carbon-fiber propeller, producing approximately 15.6 lbs of static thrust. Two 6S 8000 mAh batteries (wired in parallel) power the propulsion system, delivering:
- ~20 minutes of expected flight time
- Adequate thrust margin across all loading configurations
- Efficient cruise at ~60 ft/s, with ~3.23 lbs of drag at that velocity
Propulsion trades included dual-motor vs single-motor configurations, ESC sizing, and wind-tunnel-aligned simulations for dynamic thrust predictions.
Autonomous Flight and Computer Vision
Autonomy on MAT-4 was built around Pixhawk 4 and Jetson Nano, with radar-based obstacle avoidance and on-board computer vision.
Autonomy Highlights
- LIAN (Limited Angle) algorithm for path planning
- Radar-assisted real-time obstacle detection
- MAVLink + ROS 2 galactic for navigation and mission control
- Custom GUI for waypoint visualization and routing
- Manual takeoff/landing with fully autonomous cruise and drop profiles
Computer Vision
- OpenCV for object detection, contour extraction, and color standardization
- Tesseract OCR for character recognition
- Preliminary YOLO integration for emergent object detection
These systems worked together to localize targets, classify markings, and coordinate drop timing.
Role and Contributions
As Structures Lead, my contributions included:
- Designing the aircraft’s structural architecture, including composite layups, wing/tail structure, and fuselage segmentation
- Performing CAD modeling, structural analysis, and manufacturability planning
- Overseeing the payload mechanism integration and ensuring CG consistency
- Leading subteam meetings and coordinating across aerodynamics, propulsion, and flight systems
- Mentoring newer M-Fly members in CAD, FEA, and composite fabrication techniques
- Supporting testing operations, including structural tests, payload deployment trials, and final integration
These tasks ensured that MAT-4 remained within the weight budget, met structural requirements, and maintained reliability through iterative testing.
Testing and Performance
MAT-4 underwent repeated subsystem and full-aircraft testing, including:
- Static thrust testing using load cells and thrust carts
- Control surface torque validation
- Drop-mechanism cycle testing
- Radar and autonomy simulations
- Full-aircraft taxi, takeoff, and waypoint-tracking tests
The final integrated airframe demonstrated reliable flight behavior and consistent payload deployment performance, validating the design approach and confirming readiness for competition operations.


Conclusion
MAT-4 brought together aerodynamic optimization, composite structural design, advanced propulsion, and autonomous systems into a cohesive fixed-wing UAV capable of executing long-range waypoint missions and precision payload delivery. The project served as an excellent engineering exercise in multidisciplinary collaboration, systems integration, and iterative development—providing valuable experience that directly influenced later UAV work in my portfolio.