- Published on
MD-UAV – Tiltrotor VTOL UAV
- Authors
- Name
- Vinamr Arya



Introduction
MD-UAV (Medical Unmanned Aerial Vehicle) was a research initiative within the University of Michigan’s Aerospace Engineering Department, conducted under the guidance of Dr. Anthony Waas. The goal was to develop a tiltrotor VTOL aircraft capable of delivering medical supplies to remote or infrastructure-limited regions.
I joined the project as the new lead in Summer 2021, inheriting a partially built tiltrotor airframe from the previous team. What followed was a comprehensive re-evaluation of the design—structurally, aerodynamically, and mechanically—to determine what could be salvaged, what required redesign, and what lessons could shape future UAV platforms.
Assessment of the Inherited Design
Upon taking over the project, it became clear that the existing airframe suffered from significant structural and integration issues. The carbon-fiber spars had been attached in a way that introduced excessive vibration, which in turn made the aircraft nearly impossible to tune on PX4 or ArduPilot, especially given its large rotor diameter and overall size.
Additionally:
- The tiltrotor mechanism exhibited reliability concerns.
- Several subsystems lacked proper documentation and traceability.
- Component sizing and structural assumptions required verification.
- The partially built frame limited redesign options without major rework.
Rather than forcing the aircraft to fly in an unsafe configuration, I began a systematic investigation of propulsion, aerodynamics, stability, and firmware tuning behavior to understand the limits of the inherited design.


Aerodynamic and Structural Reevaluation
To reassess the aircraft’s viability, I re-performed key trade studies and simulations using OpenVSP, FlightStream, and STAR-CCM+. These tools helped evaluate:
- pressure distribution across the wings
- rotor–wing aerodynamic interference
- hover-to-cruise transition loads
- structural deflection under VTOL thrust
- overall aerodynamic efficiency
The studies confirmed several issues with the original configuration and identified areas where redesign was necessary. They also provided a clearer foundation for future hybrid VTOL concepts within the project.
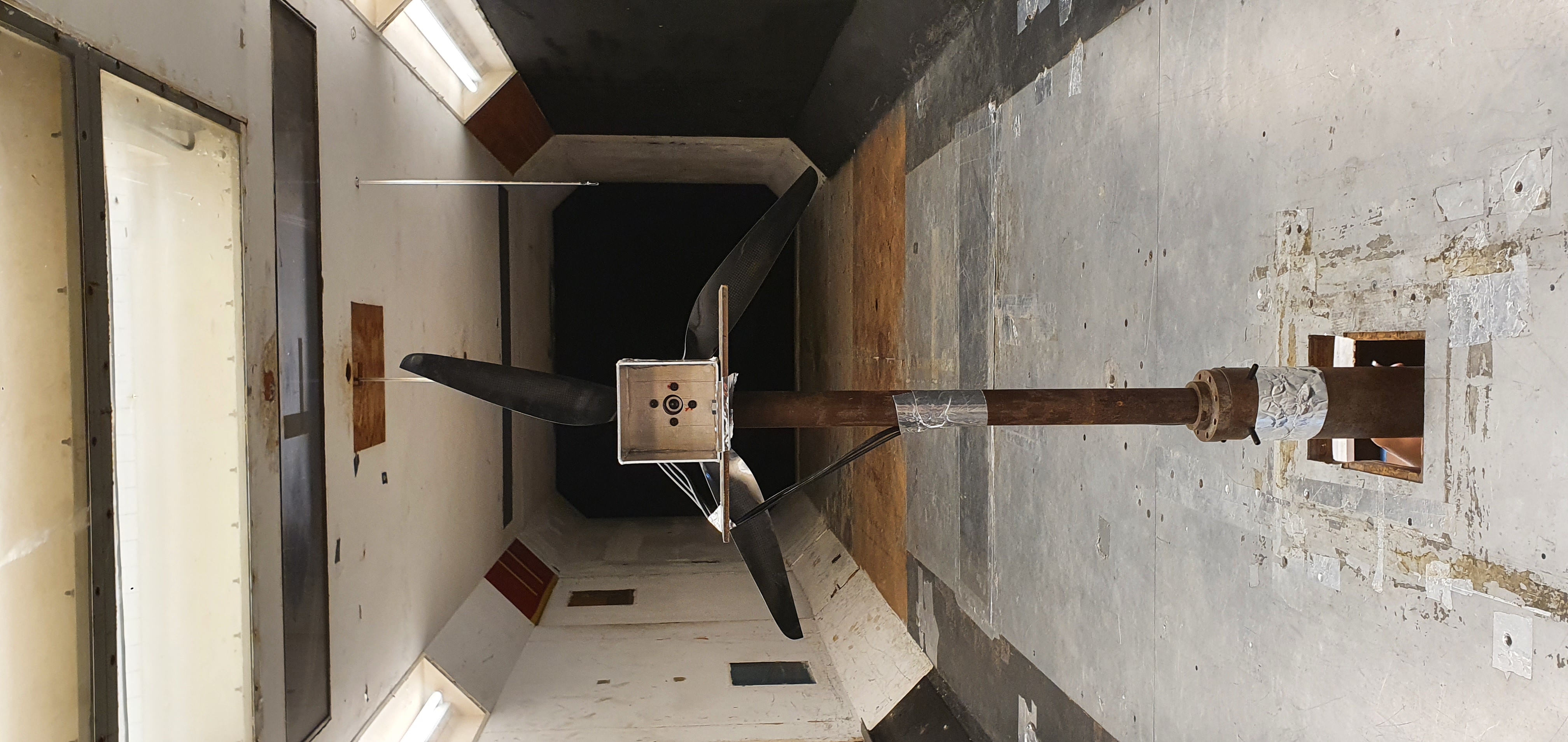
Propulsion System Testing
A major portion of the reevaluation involved conducting dynamic thrust tests in the University of Michigan’s 5×7 ft wind tunnel. These tests provided accurate data on:
- thrust behavior under varying inflow conditions
- rotor performance during transition speeds
- power loading at different disk angles
- whether a forward-flight pusher motor was required
The wind tunnel data ultimately informed our cruise and maximum velocity estimates, while also exposing limitations of the tiltrotor setup at higher advance ratios.

Firmware Tuning and Vibration Issues
Much of the project’s engineering time went into tuning PX4 and ArduPilot for such a large hybrid VTOL platform. The goal was to stabilize hover, reduce oscillations, and prepare the aircraft for untethered transition tests.
However, the inherited airframe’s high vibration levels caused severe sensor noise, preventing:
- stable attitude estimation
- reliable motor mixing
- EKF convergence
- proper PID tuning


This experience pushed me into a deep exploration of:
- filter tuning (IMU filtering, notch filters, low-pass settings)
- control loop structure in PX4
- encoder tracking for tilt-mechanisms
- power system noise isolation
- firmware-level motor output testing
These lessons later shaped my design philosophy for Kestrel Mini and subsequent UAVs: avoid moving parts wherever possible.
Transition to MD-UAV Lite
Through months of simulation, structural analysis, manufacturing assessment, and propulsion testing, it became clear that significant aspects of the inherited airframe could not be brought to a reliable flight state.
However, the components, data, and lessons learned were instrumental in shaping a new aircraft: MD-UAV Lite.
This successor model was:
- smaller, lighter, and easier to manufacture
- built around rigid, vibration-resistant geometries
- redesigned for better component placement
- structured around simpler, more dependable VTOL principles
MD-UAV Lite—and later, Kestrel Mini—represented the distilled outcome of everything learned through the larger MD-UAV aircrat.
Collaborators
MD-UAV was developed in collaboration with:
- BlueFlite, a commercial VTOL drone manufacturer
- KNUST, Ghana, for operational relevance in remote medical logistics
- Faculty and student teams within the Composite Structures Lab
These partnerships helped shape the long-term goals of the program and provided insight into the practical challenges of deploying VTOL aircraft for medical outreach.
Conclusion
MD-UAV served as an important transitional project: a chance to critically evaluate a large hybrid VTOL airframe, identify its structural and aerodynamic shortcomings, and build the experimental knowledge that informed more mature UAV platforms.
The project provided deep experience in wind tunnel testing, firmware tuning, structural redesign, and hybrid-VTOL system analysis, ultimately shaping the more successful and reliable designs that followed.